Fundamentals of vehicle–track coupled dynamics
Sponsored by

Sponsored by
A framework was conducted to investigate the dynamics of overall vehicle–track systems with emphasis on theoretical modelling, numerical simulation and experimental validation by Prof. Zhai’s group at the school of Traction Power State Key Laboratory in Southwest Jiaotong University. This research was supported by National Natural Science Foundation of China (NSFC) and National Basic Research Program of China (973 Program).
Published in the international journal of Vehicle System Dynamics, on October 14, 2009, their study established the fundamentals of vehicle–track coupled dynamics and developed a computer program named TTISIM to predict the vertical and lateral dynamic responses of the vehicle–track coupled system. It provides an efficient way to systematically optimise the design parameters of both the vehicle and the track components. Meanwhile, by adopting this method, a lot of future investigation become possible for example on dynamic interactions between vehicles and non-ballasted track structures, on the effect of track lateral properties on vehicle lateral running behaviours and on the influence of curve characteristics on ride comfort of high-speed vehicles, etc.

Typical high-speed train and track system
The classical theory of railway vehicle dynamics usually focuses on the railway vehicle itself as the analysis object without consideration of the dynamic behaviour of the track system that supports the vehicle, i.e. the track structure is assumed to be a rigid base. In fact, the railway track is a typical elastic structure with damping. Vibrations of the vehicle can be transmitted to the track via the wheel–rail contact and excite vibrations of the elastic track structure, which can in reverse influence the vibrations of the vehicle not only in the vertical direction but in the lateral direction as well. Therefore, the vibrations of a vehicle and a track are essentially coupled with each other.
To address above-mentioned issues, Prof. Zhai’s group systematically investigated the vehicle–track coupled dynamics from the entire vehicle–track system. A three-dimensional vehicle–track coupled dynamics model was developed in which a typical railway passenger vehicle is modelled as a 35-degree-of-freedom multi-body system. A traditional ballasted track was modelled as two parallel continuous beams supported by a discrete-elastic foundation of three layers with sleepers and ballasts included. The non-ballasted slab track was modelled as two parallel continuous beams supported by a series of elastic rectangle plates on a viscoelastic foundation. The vehicle subsystem and the track subsystem were coupled through a wheel–rail spatial coupling model that considers rail vibrations in vertical, lateral and torsional directions. A fast explicit integration method was applied to solve the large nonlinear equations of motion of the system in the time domain.
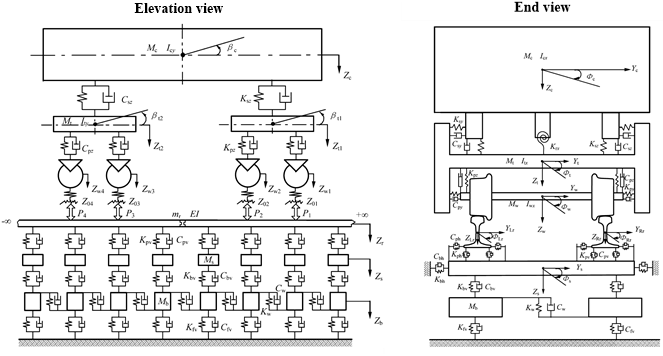
Three-dimensional vehicle–track coupled model
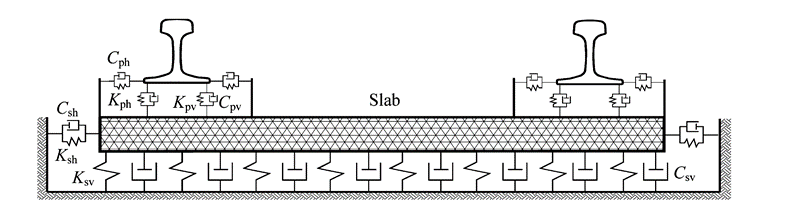
Three-dimensional slab track model
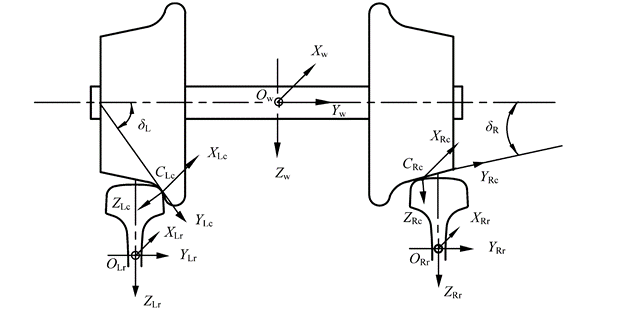
Wheel–rail coupling model
The developed three-dimensional vehicle–track coupled models and the simulation program TTISIM have been validated by a lot of field measurements conducted with a variety of vehicles and track conditions representing those of Chinese main trains and mainline tracks. Full-scale field tests include the speed-up test on the Beijing–Qinhuangdao line, the high-speed running test on the Qinhuangdao–Shenyang line and the wheel–rail dynamic interaction experiment on curved tracks of the Chengdu–Chongqing line, etc.
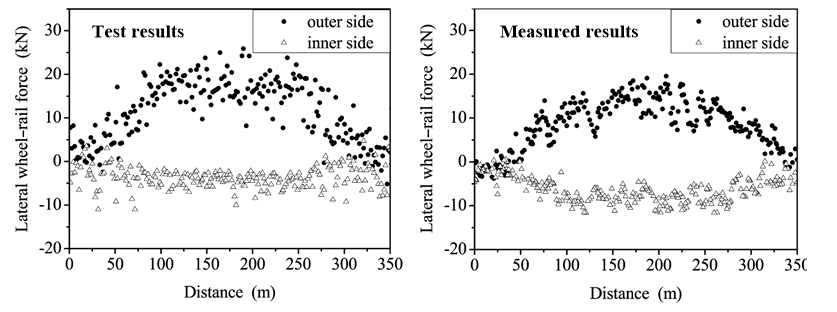
Comparison of measured and calculated lateral wheel–rail forces on a curved track
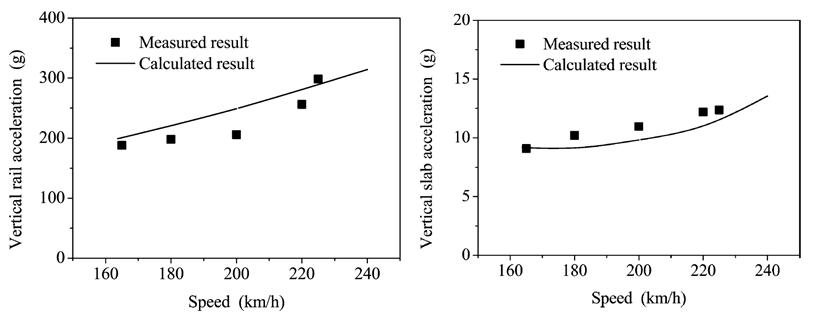
Comparison of measured and calculated vertical accelerations of the slab track system
The results show that the vehicle–track coupled model developed by Prof. Zhai’s group has been validated by full-scale field experiments, showing good correlation between theoretical and experimental results.
To ascertain the difference between the computational results obtained with the vehicle–track coupled dynamics model and those obtained with a classical vehicle dynamics model, Zhai’s group further researched the vehicle curving performances on an elastic track and a rigid track, respectively.
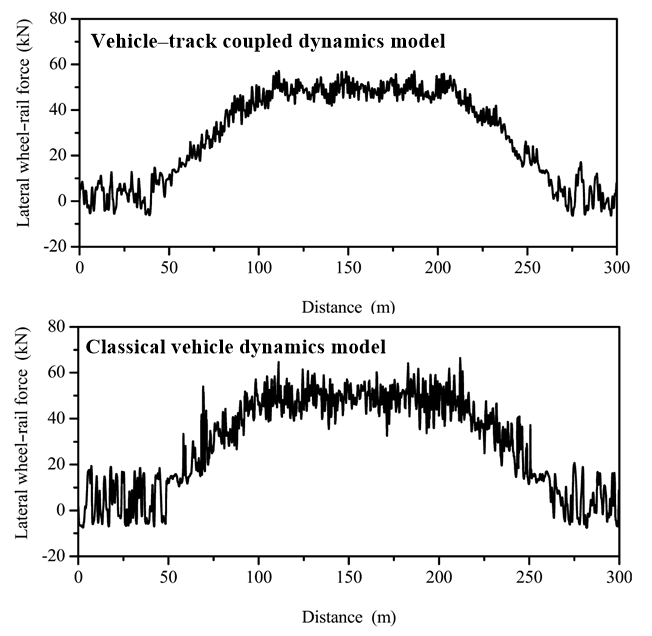
Calculated lateral wheel–rail forces for vehicle on curved track (a) elastic track model and (b) rigid track model
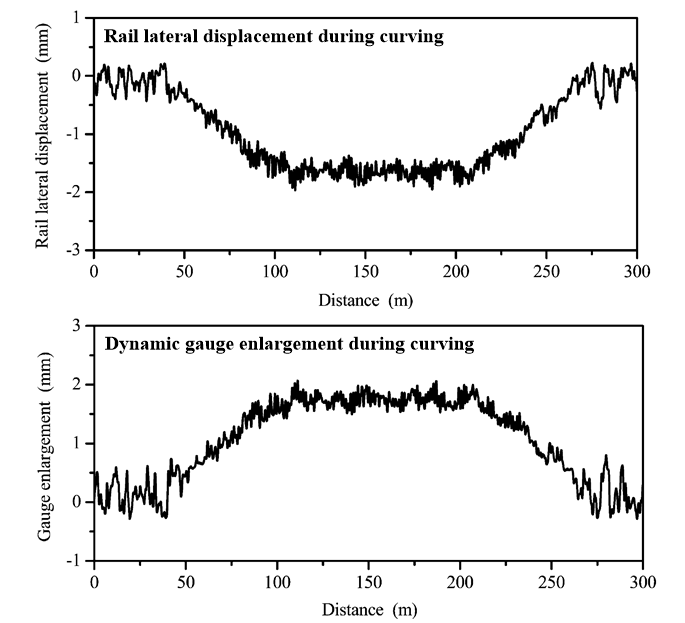
Rail lateral dynamic behaviour when the vehicle passes through the curve
Significant differences between the curving performances obtained from the vehicle–track coupled dynamics and from the classical vehicle dynamics have been found for the cases of a general vehicle curving on a very small-radius curve and a high-speed vehicle curving on a large-radius curve. The deviation is usually located within the range of 10–20%. The vehicle–track coupled dynamics gives smaller values of the curving performance indices than the classical vehicle dynamics modelling does.
Their study indicates that vehicle curving can cause obvious lateral vibrations of rails and can make the rails roll over under the action of lateral wheel–rail forces, resulting in dynamic enlargement of the gauge. The rail’s lateral motion can lead to changes in the position of the wheel–rail contact points, which influences the wheel–rail forces and thereby eventually the curving performance of the vehicle. Therefore, it is necessary to consider the vibration of the track structure when evaluating the curving performance.
Currently, the vehicle–track coupled dynamics theory developed by Prof. Zhai’s group has already become a basic method that analyses the dynamic interaction between vehicle and track. Its applications have covered the dynamic characteristic analysis of wheel–rail interaction, parameter matching and optimization of vehicle and track, safety and comfort assessments of vehicle operating, investigation of fatigue and damage of track structures, prediction of railway ground vibrations, etc.